حسگرهاي دوربين
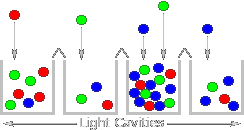
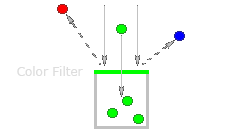
دوربين هاي ديجيتال جهت بدست آوردن تصوير نهايي از حسگر هايي كه داراي ميليون ها پيكسل بسيار ريز مي باشند ، تشكيل شده اند . زمانيكه شما دكمه شاتر دوربين را فشار مي دهيد و نوردهي آغاز مي شود ، هر يك از اين پيكسل ها كه داراي يك حفره نوري (photosite) مي باشند ، جهت جمع آوري و نگهداري فوتون ها درحفره ها رونمايي شوند . هر بار كه نور دهي باتمام برسد دوربين اين حفره ها را مي بندد ، سپس جهت شمارش و دستيابي به تعداد فوتون هاي موجود در هر يك از اين حفره ها اقدام مي كند . تعداد فوتون هاي مرتبط با هر يك از حفره ها با مقادير متفاوت ذخيره مي شوند ، كه دقت آن توسط عمق بيتي (از 0-255 براي عمق بيتي 8) تعيين مي گردد .
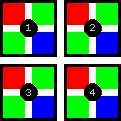
هر حفره قادر به تشخيص و تعيين تعداد رنگ هاي موجود در خود مي باشند ، بنابراين تعريف فوق صرفا جهت بوجود آوراي موجود در خود مي باشند ،ذ دن يك تصوير سياه و سفيد كاربرد خواهد داشت . براي بدست آوردن تصاوير رنگي هرحفره بايد داراي فيلتري جهت ورود آن رنگ خاص از نور محفره بايد داراي فيلتري جهت ورود آن رنگ خاص ازنور باشد . وجود باشد . در واقع در دوربين هاي ديجيتال موجود ، يكي از سه رنگ اصلي در هر حفره قرار مي گيرند ، بنابراين از 2/3هر حفره قرار مي گيرند ورود 3/2 از رنگ هاي ديگر موجود در نور جلوگيري مي شود . در نتيجه دوربين مجبور خواهد بود بمنظور ثبت اطلاعات از هر سه رنگ اصلي در هر پيكسل گ اصلي ديگر ، اطلاعات تقريبي از دو رنگ اصلي ديگر را نيز دريافت كند . معروف ترين نوع اين فيلتر ها ي رنگي بنام "Bayer array" هد بود مي ياشند كه در ذيل نشان داده شده است .
Color Filter Array
 |
 |
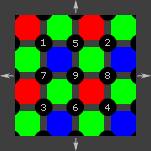
يك فيلتر Bayer array از رديف هاي يك در ميان فيلترهاي سبز - قرمز و سبز - آبي تشكيل شده است . توجه داشته باشيد كه فيلتر Bayer array از دو رديف سنسور سبز و قرمز يا آبي تشكيل شده است . رنگ هاي اصلي به يك نسبت برابر از كل سطح دريافت نمي شوند ، زيرا كه چشم انسان به رنگ نور سبز نسبت به نور قرمز و آبي بسيار حساس تر مي باشد . در حالتيكه همه رنگ ها داراي رفتاري يكسان باشند ، ميزان فراواني پيكسل هاي سبز توليد شده در يك تصوير بنحوي است كه تصويري با نويز كمتر و جزئيات دقيق تر حاصل خواهد شد . اين ويژگي همچنين روشن مي كند كه چرا نويز در كانال رنگي سبز بسيار كمتر از دو رنگ اصلي ديگر است .
 |
 |
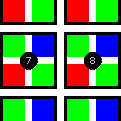
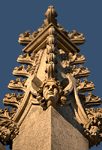
منظره اوليه
(مقياس 200%) |
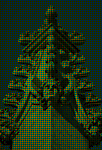
آنچه كه دوربين مي بيند
(Bayer array با فيلتر) |
يادداشت : همه دوربين هاي ديجيتال از Bayer array استفاده نمي كنند ، اما اكثر دوربين هاي متعارف از آن استفاده مي كنند . سنسور بكار رفته در مدل هاي SD9 و SD10 دوربين سيگما از نوع Foveon مي باشد كه امكان ذخيره كردن هر سه رنگ اصلي را در يك پيكسل دارا مي باشد . دوربين هاي سوني چهار رنگ قرمز ، سبز ، آبي و سبز زمزدين را در يك آرايه مشابه ذخيره مي كنند .
بكارگيري الگوريتم DEMOSAICING در حسگر هاي BAYER
Bayer demosaicing به الگوريتم تبديل رنگ هاي ناقص اوليه در حسگر Bayer به يك تصوير ديجيتال نهايي تمام رنگي با اطلاعات رنگي كامل در هر پيكسل اطلاق مي گردد . براستي با وجود عدم توانايي دوربين در اندازه گيري تمام رنگي ، چگونه اين كار انجام مي شود ؟ يكي از اين راهكارها ، بكارگيري آرايه هاي 2x2 قرمز - سبز و آبي در يك محفظه با رنگ هاي كامل مي باشد .
 |
→ |
|
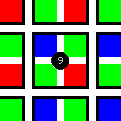
اين روش مناسب مي باشد ، اما اغلب دوربين ها باشد ، مراحل اضافه تري را جهت استخراج اطلاعات تصويري بيشتري از اين آرايه رنگي ، بكار مي گيرند . اگر دوربين همه رنگهايي را كه در هر يك از آرايه هاي 2در 2 با آنها سرو كار دارد را در همان جا در اختيار داشته باشد ، بنابراين فقط قادر به دستيابي به نيمي از رزولوشن هاي افقي و نيمي از رزلوشن هاي عمودي خواهد بود . از طرف ديگر اگر دوربين دستيابي به رنگ ها را با بكارگيري چندين آرايه 2در 2 كه نسبت به هم داراي همپوشاني باشند، انجام دهد ؛ي به رنگ ها را مي يابد .سبت به يك آرايه ز رزلوشن هاي عمودي خواهد بود . نسبت به يك آرايه 2در 2 تنها ،داراي رزلوشن بالاتري خواهد بود . در ادامه آرايه هاي 2در 2 داراي همپوشاني ، جهت استخراج اطلاعات تصويري بيشتر نشان داده شده است .
توجه داشته باشيدكه اطلاعات تصويري واقع در لبه هاي آرايه ها بحساب نمي آيند ، چونكه فرض ما بر اين است كه تصوير در همه جهات ادامه دارد . اگر اين لبه ها در واقع در اطراف محفظه آرايه وجود داشتند ، محاسبات داراي دقواقع در اطراف محفظه آرايه وجود داشتند اده شده استت نسبتا پائيني مي بود ، چون پيكسل هاي بيشتري در اطراف آن وجود ندارد . اما اين مشكلي بحساب نمي آيد ، چون اطلاعات هر يك از لبه هاي تصوير در دوربين با ميليون ها پيكسل ، قابل برش مي باشند .
الگوريتم demosaicing ديگري نيز وجود دارد كه قابليت استخراج كمي رزلوشن بيشتر و تصويري با نويز كمتر يا بعبارتي بهترين تطبيق را با بالاترين تقريب در هر كجا را دارا مي باشد .
ابزارهاي الگوريتم DEMOSAICING
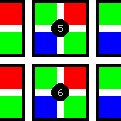
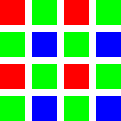
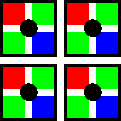
تصاوير با مقياس كوچك داراي جزئياتي نزديك به رزلوشن تعيين شده توسط حسگر مي باشند كه دربرخي موارد الگوريتم demosaicing را دچار مشكل مي كند ، كه موجب نتيجه اي غير واقعي مي شود . متداول ترين ابزار moiré ( كه بصورت "more-ay" تلفظ مي شود ) مي باشد كه ممكن است بصورت الگو هاي تكرار ، المان هاي رنگي يا آرايش پيكسل ها دريك شكل پر پيچ و خم غير واقعي ظاهر شوند :
در بالا دو تصوير با بزرگ نمائي هاي متفاوت نشان داده شده اند . به پيدايش moiré در هر چهار مربع توجه كنيد ، ايبع بزرگ نمائي هاي متفاوت نشان داده شده اند . ن خصيصه در مربع سوم بارزتر مي باشد . در نسخه كوچكتر شده در تصوير فوق علاوه بر پيچ و خم ها المان هاي رنگي نيز در مربع كوچك شده سوم ظاهر شده اند مربع سوم ها المان هاي رنگي نيز در آن ظاهر شده اند. اين ابزار هم منوط به نوع بافت و هم بهنرم افزار بكار گرفته شده جهت توليد تصوير ديجيتال با فرمت RAW مي باشد .
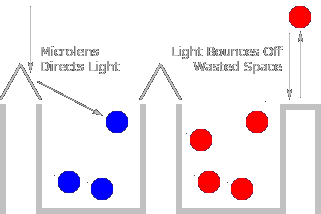
آرايه هاي MICROLENS
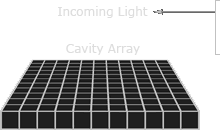
شايد جاي تعجب باشد كه در دياگرام اول اين بحث چرا هر حفره مستقيما در حفره بعدي قرار نمي گيرد . در عالم واقع حسگر دوربين photosite هاي را كه بتواند كل سطح حسگر را پوشش دهد را در اختيار ندارد .در حقيقت اين photosite ها نيمي از كل سطح را جهت تطبيق با ساير تجهيزات الكترونيكش دهد پوشش مي دهند . بين حفره هالبه هاي برآمده كوچكي وجود دارد كه فتون ها را به داخل يكي از اين حفره ها هدايت مي كند . دوربين هاي ديجيتال داراي لنز هاي بسيار رد كه فتون ها را به داخل يكي از اين حفره ها هدايت مي كند . كوچكي (microlenses) جهت افزايش قابليت جمع آوري نور در photosite ها مي باشند . اين لنز هاي بسيار كوچك در مقام مقايسه ، شبيه قيف هايي هستند كه فوتون ها را به داخل photosite كه هدايت مي كنند ، در غير اين صورت فوتون ها غير قابل استفاده مي باشند .
طراحي مناسب مي تواند سيگنال فوتون موجود در هر يك از photosite ها را طوري بهبود بيگنال فتون هادر هر يك از غير قابل استفاده مي باشند .خشد كه با يك نوردهي مشخص منجر به كاهش نويز در تصوير نهائي شود . كارخانه هاي سازنده دوربين در پي بهبود وضعيت طراحي microlens ها جهت كاهش و كنترل نويز در دوربين هاي جديدتر با فشرده سازي photosite ها و بدست آوردن مگا پيكسل بيشتر در حسگر مورد - با رزلوشن بالا - مي باشند .
منابع : http://www.cambridgeincolour.com/tutorials/camera-sensors.htm
ترجمه : جابر يزدانخواه كناري